1)
DEFINIR
FISICA Y CADA UNA DE SUS RAMAS
La física es la ciencia que
estudia el comportamiento y las relaciones entre la materia, la energía, el
espacio y el tiempo, podemos decir que la física investiga los fenómenos que
ocurren en la naturaleza y en el universo con el objeto de establecer leyes
matemáticas que puedan predecir su comportamiento.
La Fisica se
divide en 3 Ramas: la Física
clásica, la Física moderna y la Física contemporánea.
- La Fisica Clasica se
encarga del estudio de aquellos fenómenos que tienen una velocidad
relativamente pequeña comparada con la velocidad de la luz y cuyas escalas
espaciales son muy superiores al tamaño de átomos y moléculas.
- La
Fisica Moderna se
encarga de los fenómenos que se producen a la velocidad de la luz o valores cercanos a ella o cuyas escalas
espaciales son del orden del tamaño del átomo o inferiores y fue desarrollada
en los inicios del siglo 20.
- La Fisica Contemporanea se encarga del estudio de los fenómenos no-lineales,
de la complejidad de la naturaleza, de los procesos fuera del equilibrio
termodinámico y de los fenómenos que ocurren a escalas mesoscópicas y
nanoscópicas.
2)APORTES DE TOLOMEO , COPERNICO , ISAAC NEWTON ,
GALILEO GALILEI , MAXWELL , ARQUIMEDES , ALBERT EINSTEIN , BENJAMIN FRANKLIN
PTOLOMEO (83 - 126 dC)
Pensador, matemático y astrónomo antigüo de la ciudad de Alejandría, en Egipto.
De orígen griego, Ptolomeo dedicó gran parte de sus estudios a describir los
movimentos de los astros en busca de razones matemáticas que sustentaran el
modelo geocéntrico de Aristóteles.
Esencialmente, Ptolomeo así aseguró la "correcta apreciación de
Aristótles" al respecto de que la Tierra existía estacionaria en el centro
del Universo, en tanto los astros eran "gases luminosos" que giraban
en torno a ella, cosas ligeras que flotaban en el cielo entre la Tierra y la
bóveda celeste (la capa más exterior del universo a la cual estaban
"adosadas" las estrellas)... Visión que sería imperante durante toda
la antigüedad y la Edad Media.
NICOLÁS COPÉRNICO (1473 - 1543 dC)
Astrónomo prusiano (actual Polonia), Copérnico es considerado por muchos como
uno de los primeros "hombres de renacimiento": estudioso, curioso y
erudito, desarrolló na metodología para la astronomía que se basaba al 100% en
las observaciones en vez de seguir las "indicaciones" de las cartas
astronómicas de otras personas.
Las observaciones, experimentos y metodología escrupulosa de Copérnico lo llevó
en en el año de 1514 a arriesgarse a proponer una idea revolucionaria: que el
centro del Universo no era la Tierra, sino el Sol; cosa que naturalmente lo
puso en grave peligro de enemistarse con la Iglesia Católica por ser una idea
considerada "herética".
Si bien Copérnico se salvó de ser enjuiciado (y probablemente ejecutado) por
afirmar esto, ello se debió en gran parte a que en vida no publicó el libro
"De revolutionibus orbium coelestium", donde explicaba matemáticamente
sus observaciones y conclusiones al respecto. El libro sólo se publicó una vez
que él murió, y durante algún tiempo la Iglesia de hecho consideró el libro
como "lectura prohibida".
GALILEO GALILEI (1564 - 1452 dC)
Astrónomo y físico tocano (actualmente Italia), es considerado por muchos como
el padre de la ciencia moderna, siendo que fue el primer científico en seguir
un riguroso método para sus investigaciones, desarrollándo los cinco pasos
cruciales del método científico: hipótesis, observación, experimentación,
comprobación y registro de conclusiones.
Galieo ha pasado a la historia por dos cosas importantes: fue el primer europeo
en usar un telescopio para observar los astros (con lo cual, entre otras cosas,
descubrió los cráteres en la Luna, las 4 lunas principales de Júpiter, los
anillos de Saturno y las manchas Solares) y también apoyó públicamente a
Copérnico, en su libro "Diálogo Concerniente a los Dos Sistemas de
Concepción del Mundo" (irónicamente encargado por la Inquisición para
"desmentir" las ideas de Copernico).
Galileo fue enjuiciado por la Inquisición por afirmar que la Tierra giraba en
torno al Sol y fue obligado a retractarse, momento en el que la leyenda asegura
que dijo la célebre "Y sin embargo se mueve" (refiriéndose, por
supuesto, a la Tierra). Murió en cautiverio dentro de su propia casa, si bien
su obra ayudó a crear la revolución más importante en toda la historia de la
Astronomía, convirtiéndola en una ciencia exácta.
.
ISAAC NEWTON (1643 -1727 dC)
Considerado uno de los físicos y matemáticos más importantes de la historia,
Newton nació en Lincolnshire, Inglaterra.
Genio centífico indiscutible, dedicó la mayor parte de su vida adulta a lla
investigación en el campo de las matemáticas y la física.
Entre sus trabajos destacan la invención del Cálculo Diferencial (una forma
completamente diferente de matemáticas al álgebra), su estudió y eventual
postulación de las leyes de la mecánica del movimiento, (conocidas hasta la
fecha precísamente como "Leyes de Newton") y la su estudio de la
mecánica de los movimientos de los astros... estos últimos publicados en el
famoso libro "Philosophiae Naturalis Principia Mathematica", donde
publicó la famosa "Ley de la Gravitación Universal".
El trabajo de Newton fue tan importante para la ciencia que señaló un
parteaguas, delimitando así para siempre lo que el método científico es y cómo
se ha de postular una teoría. Ningún nombre ha sido tan importante en la
historia de la cosmología como él hasta que ya en el siglo XX, Albert Einstein
postulara la "Teoría Especial de la Relatividad"... 300 años después
de Newton.
Fuente
ALBERT EINSTEIN (1879- 1955 DC)
Fueron muchas y muy
importantes las aportaciones del físico de origen alemán Albert
Einstein (1879-1955)
al mundo de la ciencia. Sus descubrimientos marcaron una época, hasta el punto
de convertirse en uno de los personajes más destacados del pasado siglo
XX.
Para empezar, Einstein firmó la Teoría
de la Relatividad General, que supuso una auténtica revolución
en el entendimiento de la gravedad. Años antes, el científico había formulado
la Teoría de la Relatividad Especial,
inspirada en aportaciones previas de los investigadores Henri Poincaré y
Hendrik Lorentz.
Otras deducciones muy
famosas de Einstein fueron las relacionadas con el movimiento
Browniano, el efecto fotoeléctrico o laequivalencia masa – energía. Además, fue
pionero con su Teoría del Quántum en la Radiación,
esencial para el funcionamiento de la tecnología láser, y los tan de moda Sistemas
de Posicionamiento Global (GPS).
Premio Nobel de Física en 1921, Albert Einstein también está considerado el padre
de la bomba atómica, aunque en sus escritos se reveló como un
firme defensor de los movimientos pacifista, socialista y sionista.
ARQUIMEDES
Arquímedes
y sus aportes a la física
es
recordado por el Principio de Arquímedes y por sus aportes a la cuadratura del
círculo, el estudio de la palanca, eltornillo de Arquímedes, la espiral de
Arquímedes y otros aportes a la matemática, la ingeniería y la geometría.Aunque
probablemente su contribución científica más conocida sea el principio de la
hidrostática que lleva su nombre, elPrincipio de Arquímedes, no fueron menos
notables sus disquisiciones acerca de la cuadratura del círculo,
eldescubrimiento de la relación aproximada entre la circunferencia y su
diámetro, relación que se designa hoy día con la
letra
griega π (pi).
Arquímedes
fue autor de numerosas obras de variada temática en las que destaca el rigor de
sus demostracionesgeométricas, razón por la que es considerado el más notable
científico y matemático de la Antigüedad. Aunque muchosde sus escritos se perdieron
en la destrucción de la Biblioteca de Alejandría, han llegado hasta la
actualidad a través de lastraducciones latinas y árabes. Aquí se indican
algunas de ellas:El arenario.La medida del círculo.De la esfera y el
cilindro.De la cuadratura.De la Parábola.De los esferoides y conoides.De las
espirales.Determinación de los centros de gravedad en las líneas y en los
planos.Del equilibrio de los cuerpos en los fluidos.El método.De los métodos
mecánicos en la geometría (Palimpsesto de Arquímedes).Hiso algunos aportes
importantes y bastantebásicos pero entre ellos el mas destacado es el "
Principio de Arquímedes"El cual dice que "un cuerpo total o
parcialmente sumergido en un fluido estático, será empujado con una fuerza
igual alpeso del volumen de fluido desplazado por dicho objeto"Fy = mg =
Pf VgDonde:Pf ->densidad del fluido.V ->volumen del cuerpo sumergido g ->aceleración de la gravedad.
APORTES
DE BENJAMIN FRANKLIN A LA FISICA
Benjamín Franklin es considerado como el Padre
de la Meteorología debido a que fue el primero en aporatar ideas de cómo se
desarroban distintos fenómenos atmosféricos en nuestro planeta, lo que lo llevo
a el a lanzar la teoría que resulto correcta de que el movimiento del tiempo
atmosférico depende de las diferencias de presión y esta es considerada por
muchos la base de la meteorología moderna.
Como ya sabemos todos Benjamín Franklin fue
aquel inventor del pararrayos como protección de lugares altos donde los rayos
tenían mejor facilidad de caer, el edificio “The One Liberty Place” en Philadelfia
tiene tiene uno de los mejores pararayos construidos por Benjamín Franklin.
Franklin fue considerado también unos de los
mejores impresores en los siglos XVIII, siendo ya en 1743 alrededor de los 40
años de edad cuando comenzó a dedicarse a la electricidad donde construyo un
generador electroestático en 1745 para conservar y generar electrónica
3)Aportes de la física a mi carrera , a la sociedad y al hogar
La humanidad ha luchado
siempre por sobrevivir en un medio natural que en ocasiones se torna cruel y
hostil, situaciones que en su gran mayoría ha sido provocada por la humanidad
misma. En la actualidad enfrentamos falta de materiales, falta de energía, la
misma degradación del medio ambiente entre otros problemas que automáticamente
coloca en una situación critica la seguridad común. Sin embargo tenemos la
esperanza de que con el constante desarrollo de la física como ciencia en
conjunto con otras ciencias importantes se elimine la amenaza que afrontamos.
Ciertamente la física
trabajara un papel importante o mas aun principal en la obtención del logro
establecido, que es eliminar el peligro al cual la humanidad gradualmente se ha
expuesto, debido a circunstancias de la naturaleza y daños creados por obra de
la humanidad.
La física es una ciencia
de vasto alcance que abarca desde la investigación de partículas sub-atomicas,
hasta el estudio de las galaxias muy distantes en los confines del universo
conocido. No es fácil clasificar materia tan extensa de manera que resulte
ideal para todos los objetivos. Resulta tan amplia la gama en la que podemos
hacer física, que en cierto sentido se puede considerar que la áreas más
especializadas de las ciencias son ramas de la física, y que generalmente
quienes las realizan no piensan ni hablan como físicos.
En toda la historia de
la física, los científicos se han interesado en dar uso práctico de sus
conocimientos para la elaboración de ciertos dispositivos que ayuden a
facilitar una tarea, mediante el uso de los principios de la física. Ejemplo de
esto, el reloj de péndulo, el cronometro, la maquina de vapor, el generador, un
motor electrico, los sistemas de radio y TV… etc.
Por lo general los
físicos se preocupan por el desarrollo tecnológico sólo en sus primeras etapas,
y tan pronto se comprende bien la aplicación de los principios en que se basan,
entregan tales dispositivos a los ingenieros para que los perfeccionen y
fabriquen masivamente. A su vez los ingenieros incorporan algunos arreglos para
refinar aquel producto creado por la idea de un conocedor de la física. Se
puede considerar a la ingeniería como una física aplicada.
La ciencia es un
conjunto organizado de conocimientos, que de manera constante y creciente busca
explicaciones de las cosas. La tecnología, sin embargo busca la aplicación de
leyes y principios de las ciencias para fabricar o mejorar algunos productos.
Esto de una manera une a las ciencias con la tecnología de manera que se
necesita de una para la existencia de otra. Ejemplo de esto.- Un científico
necesita de aparatos modernos y tecnológicamente preparados para mantenerse a
la vanguardia del estudio de la ciencia, y sin dicha ciencia no existiese la
tecnología que hoy conocemos.
4)¿Que es medir ¨¡ ¿Qué es una magnitud física ¡
Medir :
Es comparar una magnitud con otra , tomada de
manera arbitraria como referencia , denominada patrón y expresar cuántas veces
la contiene .
¿QUE ES UNA MAGNITUD FISICA ¡
Una magnitud física es una propiedad o cualidad medible de
un sistema físico, es decir, a la que se le pueden asignar distintos valores
como resultado de una medición o una relación de medidas.
Es toda propiedad de los cuerpos que se puede medir. Por ejemplo:
temperatura, velocidad, masa, peso, etc.
5)¿ A QUE LLAMAMOS MAGNITUDES FISICAS FUNDAMENTALES ¡ ¿DERIVADAS ¡
EJEMPLOS. UNIDADES DE MEDIDAS USADAS EN EL SISTEMA INTERNACIONAL (SI) Y EN EL
CEGESIMAL
MAGNITUDES FUNDAMENTALES Y DERIVADAS
Medir es comparar una magnitud cualquiera con otra de la misma
naturaleza, tomando esta como unidad. Las magnitudes se utilizan para las
medidas o mediciones en física, es decir, es uno de los elementos básicos de
mayor prioridad en la misma.
Se denominan magnitudes a ciertas propiedades o aspectos observables de un
sistema físico que pueden ser expresados en forma numérica. En otros términos,
las magnitudes son propiedades o atributos medibles .
Las magnitudes pueden ser fundamentales y derivadas.
¿Qué son Magnitudes Fundamentales?
Las magnitudes fundamentales son aquellas que se concretan independientemente
una de otras y al combinarse dan origen dan origen a las magnitudes
derivadas.
El número de magnitudes tomadas como fundamentales, es el mínimo que se
necesita para dar una descripción coherente de las cantidades físicas.
¿Qué son Magnitudes Derivadas?
Son aquellas que se originan con la combinación de las magnitudes fundamentales
y se establecen con el uso de otras.
Así tenemos el volumen, que surge del producto de tres longitudes; la rapidez
que se desplaza un cuerpo, se define como la relación de una longitud y un
tiempo. En este ejemplo se aprecia que las magnitudes rapidez y volumen son
derivadas, mientras que la longitud y el tiempo son fundamentales.
6)¿ COMO REALIZAR UNA REGLA DE TRES ? USAR EN LA CONVERSION DE UN SISTEMA DE UNIDAD
A OTRO
Regla de tres simple
En la regla de tres simple, se establece la relación de
proporcionalidad entre dos valores conocidos A y B,
y conociendo un tercer valor X,
calculamos un cuarto valor. Y,4
La relación de proporcionalidad puede ser directa o inversa,
será directa cuando a un mayor valor de A habrá un mayor valor de B, y será inversa, cuando se de
que, a un mayor valor de A corresponda un menor valor de B, veamos cada uno de esos
casos.
Regla de tres simple directa
La regla de tres simple directa se fundamenta en una relación de proporcionalidad, por lo que rápidamente
se observa que:
Donde k es la constante de proporcionalidad,
para que esta proporcionalidad se cumpla tenemos que a un aumento de A le corresponde un aumento de B en la misma proporción. Que podemos
representar:
y diremos que: A es a B directamente, como X es a Y,
siendo Y igual al producto de B por X dividido entre A.
Imaginemos que se nos plantea lo siguiente:
|
Si necesito 8 litros de pintura para pintar 2 habitaciones,
¿cuántos litros necesito para pintar 5 habitaciones?
|
Este problema se interpreta de la siguiente manera: la relación
es directa, dado que, a mayor número de habitaciones hará falta más pintura, y
lo representamos así:
Regla de tres simple inversa
En la regla de tres simple inversa,5 en la relación entre los valores se cumple que:
donde e es un producto constante, para que
esta constante se conserve, tendremos que un aumento de A, necesitara una disminución
de B, para que su producto
permanezca constante, si representamos la regla de tres simple inversa,
tendremos:
y diremos que: A es a B inversamente, como X es a Y,
siendo Y igual al producto de A por B dividido por X.
Si por ejemplo tenemos el problema:
|
Si 8 trabajadores construyen un muro en 15 horas, ¿cuánto
tardarán 5 trabajadores en levantar el mismo muro?
|
Si se observa con atención el sentido del enunciado, resulta
evidente que cuantos más obreros trabajen, menos horas necesitarán para
levantar el mismo muro (suponiendo que todos trabajen al mismo ritmo).
El total de horas de trabajo necesarias para levantar el muro
son 120 horas, que pueden ser aportadas por un solo trabajador que emplee 120
horas, 2 trabajadores en 60 horas, 3 trabajadores lo harán en 40 horas, etc. En
todos los casos el número total de horas permanece constante.
Tenemos por tanto una relación de proporcionalidad inversa, y
deberemos aplicar una regla de tres simple inversa, tenemos:
Regla de tres compuesta
En ocasiones el problema planteado involucra más de tres
cantidades conocidas, además de la desconocida.6 Observemos el siguiente ejemplo:
|
Si 12 trabajadores construyen un muro de 100 metros en 15 horas,
¿cuántos trabajadores se necesitarán para levantar un muro de 75 metros en 26
horas?
|
En el problema planteado aparecen dos relaciones de
proporcionalidad al mismo tiempo. Además, para completar el ejemplo, se ha
incluido una relación inversa y otra directa. En efecto, si un muro de 100
metros lo construyen 12 trabajadores, es evidente que para construir un muro de
75 metros se necesitarán menos trabajadores. Cuanto más pequeño es el muro,
menos número de obreros precisamos: se trata de una relación de proporcionalidad directa. Por
otro lado, si disponemos de 15 horas para que trabajen 12 obreros, es evidente
que disponiendo de 26 horas necesitaremos menos obreros. Al aumentar una
cantidad, disminuye la otra: se trata de una relación de proporcionalidad inversa.
El problema se enunciaría así:
|
100 metros son a 15 horas y 12 trabajadores como 75 metros son a
26 horas y Y trabajadores.
|
La solución al problema es multiplicar 12 por 75 y por 15, y el
resultado dividirlo entre el producto de 100 por 26. Por tanto, 13500 entre
2600 resulta 5,19 (lo que por redondeo resultan ser 6
trabajadores ya que 5 trabajadores no serían suficientes).
Formalmente el problema se plantea así:
·
La resolución implica plantear cada regla de tres simple por separado.
Por un lado, la primera, que, recordemos, es directa, y se resuelve así:
·
A continuación planteamos la segunda, que, recordemos, es
inversa, y se resuelve así:
·
A continuación unimos ambas operaciones en una sola, teniendo
cuidado de no repetir ningún término (es decir, añadiendo el término C una sola vez):
lo que nos da la solución buscada.
El problema se puede plantear con todos los términos que se
quiera, sean todas las relaciones directas, todas inversas o mezcladas, como en
el caso anterior. Cada regla ha de plantearse con sumo cuidado, teniendo en
cuenta si es inversa o directa, y teniendo en cuenta (esto es muy importante)
no repetir ningún término al unir cada una de las relaciones simples.
Ejemplos
·
Para pasar 60 grados a radianes podríamos establecer la siguiente regla de
tres:
Ubicamos la incógnita en la primera posición:
Esto formaliza la pregunta "¿Cuántos radianes hay en 60
grados, dado que π radianes son 180 grados?". Así tenemos que:
Una técnica útil para recordar cómo encontrar la solución de una
regla de tres es la siguiente: X es igual al producto de los términos cruzados
(π y 60, en este caso) dividido por el término que está cruzado con X.
·
Calcular cuántos minutos hay en 7 horas. Sabemos que hay 60
minutos en 1 hora, por lo que escribimos:
El resultado es:
7)
CIFRAS SIGNIFICATIVAS , EJEMPLOS
Las cifras
significativas representan el
uso de una o más escalas de incertidumbre en
determinadas aproximaciones. Se dice que
4,7 tiene 2 cifras significativas, mientras que 4,70 tiene 3. Para distinguir
los ceros que son significativos de los que no son, estos últimos suelen
indicarse como potencias de 10, por ejemplo 5724 será 57,2x102, con
3 cifras significativas. También, cuando no se pueden poner más una cierta
cantidad de cifras, por ejemplo de tres cifras simplemente, a la tercera cifra
se le incrementa un número si el predecesor es 5 con otras cifras o mayor que 5
y si es menor simplemente se deja igual. Ejemplo 5,3689 consta de 5 cifras
significativas, si sólo se pueden mostrar tres cifras, se le suma una unidad a
la cifra 6 (6+1=7) ya que la cifra que la precede 8 es mayor que 5, así que
queda 5,37 y si el número es menor que cinco: así 5,36489 y se redondea queda
5,36, no aumenta por que la cifra 4 es menor que 5. Cuando la cifra a redondear
esta precedida exactamente por 5, se considerará si la cifra a redondear es par
o impar, ejemplo 12,35 para ser redondeada a 3 cifras, se observa que el dígito
3 que precede al 5 es impar, por tanto se incrementa en 1 cifra quedando 12,4,
en cambio 0,185, por ser 8 dígito par, se mantiene su valor 18,0x10-2 El uso de estas considera que el
último dígito de
aproximación es incierto, por ejemplo, al determinar el volumen de un líquido con una probeta cuya
resolución es de 1 ml, implica una escala de incertidumbre de 0,5 ml. Así se
puede decir que el volumen de 6 ml será realmente de 5,5 ml a
6,5 ml. El volumen anterior se representará entonces como (6,0 ±
0,5) ml. En caso de determinar valores más próximos se tendrían que
utilizar otros instrumentos de
mayorresolución, por
ejemplo, una probeta de divisiones más finas y así obtener (6,0 ± 0,1) ml
o algo más satisfactorio según la resolución requerida.
8) REGLAS PARA TRABAJAR CON CIFRAS SIGNIFICATIVAS (SUMA ,
RESTA , MULTIPLICACION)
·
En adición y sustracción las cifras decimales no deben superar el
menor número de cifras decimales que tengan los sumandos. Si
por ejemplo hacemos la suma 92,396 + 2,1 = 94,496, el resultado deberá
expresarse como 94,5, es decir, con una sola cifra decimal como la cantidad
2,1.
Otro ejemplo:
102,061 - (1,03) <------- Tenemos dos cifras después de la coma decimal
= 101,031 <------- esto se redondeará a 101,03
Cálculos en cadena
Para los cálculos en cadena, es decir, que su procedimiento se derive a más de un paso, se
utiliza un seguimiento modificado. Considere el siguiente cálculo en dos pasos:
1.
A × B = C
2.
C × D = E
Supongamos que A = 3,66 B = 8,45 D = 2,11. Dependiendo si C se redondea a tres o cinco significativas, se obtiene un valor diferente
para E:
Método 1
Los números después de la coma son los decimales que se dejan
después de la multiplicación para que sea una cifra significativa 3,66 × 8,45 =
30,9
30,9 × 2,11 = 65,2
Método 2
3,66 × 8,45 = 30,927 ; luego 30,927 × 2,11 = 65,25597 ~
65,3
Se redondea en 65,3 porque tenemos tres cifras significativas en
los factores del producto.
Sin embargo, si se ha hecho el cálculo como 3,66 × 8,45 × 2,11
en una calculadora sin redondear el resultado intermedio, se habrá obtenido 65,3 como resultado
para E. En general, cada paso del cálculo presentará números exactos de cifras
significativas. En algunos casos se redondea la respuesta final con el número correcto de cifras
significativas. En las respuestas para todos los cálculos intermedios se añade
una cifra significativa más.
9 ) ¿ PARA QUE SE USA LA NOTACION
CIENTIFICA ?
La notación científica es un recurso
matemático empleado para simplificar cálculos y representar en forma concisa
números muy grandes o muy pequeños. Para hacerlo se usan potencias de diez.
Básicamente, la notación científica
consiste en representar un número entero o decimal como potencia de diez.
La notación científica (o notación
índice estándar) es una manera rápida de representar un número utilizando
potencias de base diez. Esta notación se utiliza para poder expresar fácilmente
números muy grandes o muy pequeños.
Notación Científica: es una manera de
escribir números en dos partes:
• Sólo las cifras (con el punto decimal
después de la primera cifra), seguidas por
• ×10 a la potencia que mueve el punto
decimal donde deberías estar (o sea, que muestra cuántas posiciones se mueve el
punto decimal).
10) ¿ COMO SE EXPRESA UN
NUMERO EN NOTACION CIENTIFICA ?
La notación científica se aplica expresando un
número con una posición entera y el resto de la cifra en posiciones decimales,
multiplicado por la potencia de 10 que corresponda.
Ejemplo: 0.0001478 = 1,478 x 10 elevado a menos
4
6400000m = 6.4 x 10 elevado a 6 m
11) ¿
REGLAS PARA TRABAJAR CON NOTACION CIENTIFICA ( SUMA, RESTA, MULTIPLICACION,
DIVISION, POTENCIACION Y RADICACION )?
Para sumar o restar dos números en notación científica, es necesario que los exponentes sean los mismos. Es decir, uno de los valores debe ser
transformado para que su exponente sea igual al del otro. La transformación
sigue el mismo principio de equilibrio. El resultado probablemente no estará en forma estándar, siendo
convertido posteriormente.36
Ejemplos:
 (no estándar) o
(no estándar) o  (estandarizado)
(estandarizado)
Multiplicar las mantisas y sumar los exponentes de cada valor. Probablemente, el
resultado no será estándar, pero se puede convertir.36
Ejemplo:
 (não padronizado)
(não padronizado)  (convertido a notación estándar)
(convertido a notación estándar)
 (ya estandarizado sin necesidad de conversión)
(ya estandarizado sin necesidad de conversión)
Dividir las mantisas y restar los exponentes de cada valor. Probablemente, el
resultado no será estándar, pero se puede convertir:36
Ejemplos:
 (estandarizado)
(estandarizado)
 (no estándar)
(no estándar) 
La mantisa es elevada al exponente externo y el congruente de
base diez se multiplica por el exponente externo.36
 (estandarizado)
(estandarizado)
Antes de realizar la radicación es necesario transformar un
exponente a un múltiplo del índice. Después de que se hace esto, el resultado
es la radicación de la mantisa multiplicada por diez elevado a la relación
entre el exponente y el índice de radical.36
12 ) ¿ A QUE LLAMAMOS MAGNITUDES ESCALARES Y VECTORIALES ? EJEMPLOS
Las magnitudes son atributos
con los que medimos determinadas propiedades físicas, por ejemplo una
temperatura, una longitud, una fuerza, la corriente eléctrica,
etc. Encontramos dos tipos de magnitudes, las escalares y las vectoriales.
Magnitudes
escalares
Las magnitudes escalares
tienen únicamente como variable a un número que representa una determinada
cantidad. Por ejemplo la masa de
un cuerpo, que se mide en Kilogramos.

Magnitudes
vectoriales
En muchos casos las magnitudes escalares no dan
información completa sobre una propiedad física. Por ejemplo una fuerza de
determinado valor puede estar aplicada sobre un cuerpo en diferentes sentidos y
direcciones. Tenemos entonces las magnitudes vectoriales que, como su nombre lo
indica, se representan mediante vectores, es decir que además de un módulo (o valor absoluto) tienen
una dirección y un sentido. Ejemplos de magnitudes vectoriales son la velocidad
y la fuerza.

13) ¿ QUE ES UN VECTOR ? ¿
COMO SE REPRESENTA ?
Un vector es todo segmento de recta dirigido en el espacio. Cada
vector posee unas características que son:
Origen
O también denominado Punto de aplicación. Es el
punto exacto sobre el que actúa el vector.
Módulo
Es la longitud o tamaño del vector. Para hallarla es preciso
conocer el origen y el extremo del vector, pues para saber cuál es el módulo
del vector, debemos medir desde su origen hasta su extremo.
Dirección
Viene dada por la orientación en el espacio de la recta que lo
contiene.
Sentido
Se indica mediante una punta de flecha situada en el extremo del
vector, indicando hacia qué lado de la línea de acción se dirige el vector.
Hay que tener muy en cuenta el sistema de referencia de los
vectores, que estará formado por un origen y tres ejes perpendiculares. Este
sistema de referencia permite fijar la posición de un punto cualquiera con
exactitud.
El sistema de referencia que usaremos, como norma general, es el Sistema de Coordenadas Cartesianas.

Para poder representar cada vector en este
sistema de coordenadas cartesianas, haremos uso de tres vectores unitarios. Estos vectores unitarios,
son unidimensionales, esto es, tienen módulo 1, son perpendiculares entre sí y
corresponderán a cada uno de los ejes del sistema de referencia.
Por ello, al eje de las X, le dejaremos corresponder el vector
unitario  o también denominado
o también denominado  .
Del mismo modo, al eje Y, le corresponderá el vector unitario
.
Del mismo modo, al eje Y, le corresponderá el vector unitario  o también denominado
o también denominado  .
Finalmente, al eje Z, le dejaremos corresponder el vector unitario
.
Finalmente, al eje Z, le dejaremos corresponder el vector unitario  o también denominado
o también denominado  .
Por tanto, obtendríamos un eje de coordenadas cartesianas de la
siguiente forma:
.
Por tanto, obtendríamos un eje de coordenadas cartesianas de la
siguiente forma:
Denominamos Magnitudes Escalares a aquellas en las que las medidas quedan correctamente expresadas
por medio de un número y la correspondiente unidad. Ejemplo de ello son las
siguientes magnitudes, entre otras:
Masa
Temperatura
Presión
Densidad
Las magnitudes vectoriales son magnitudes que para estar
determinadas precisan de un valor numérico, una dirección, un sentido y un
punto de aplicación.
Vector
Un vector es la expresión que proporciona la medida de cualquier
magnitud vectorial. Podemos considerarlo como un segmento orientado, en el que
cabe distinguir:
- Un origen o punto de
aplicación: A.
- Un extremo: B.
- Una dirección: la de la recta
que lo contiene.
- Un sentido: indicado por la
punta de flecha en B.
- Un módulo, indicativo de la
longitud del segmento AB.
Vectores iguales
Dos vectores son iguales cuando tienen el mismo módulo y la misma
dirección.
Vector libre
Un vector libre queda caracterizado por su módulo, dirección y
sentido. El vector libre es independiente del lugar en el que se encuentra.
a+b=(axi+ayj+ azk)+(bxi+byj+
bzk)=(ax+bx)i+(ay +by)j+(az+bz)k
Propiedades
Conmutativa: a+b=b+a
Asociativa: (a+b)+c=a+(b+c)
Elemento Neutro: a+0=a
Elemento Simétrico: a+(-a)=a-a=0
Cualquier vector puede ser considerado como resultado de la suma de
tres vectores, cada uno de ellos en la dirección de uno de los ejes
coordenados.
Si consideramos ahora sobre cada eje un vector, aplicado en el
origen, cuyo sentido es positivo y cuyo módulo consideramos como unidad de
longitudes, podemos sustituir cada uno de los sumandos de la expresión anterior
por el producto de un escalar por el correspondiente vector unidad.
De ese modo,
Los escalares  ,
,  y
y  se denominan componentes del vector y se representan por:
Los vectores
se denominan componentes del vector y se representan por:
Los vectores  son los vectores unitarios y suelen representarse respectivamente
por i, j, y k.
También puede representarse de la siguiente forma:
son los vectores unitarios y suelen representarse respectivamente
por i, j, y k.
También puede representarse de la siguiente forma:
La suma de dos vectores libres es otro vector libre que se
determina de la siguiente forma:
Se sitúa el punto de aplicación de uno de ellos sobre el extremo
del otro; el vector suma es el vector que tiene su origen en el origen del
primero y su extremo en el extremo del segundo.
Por tanto, el vector suma de dos vectores coincide con una de las
diagonales, la "saliente", del paralelogramo que puede formarse con
los vectores que se suman; la otra diagonal representa la resta de dichos
vectores.
Para efectuar sumas o restas
de tres o más vectores, el proceso es idéntico. Basta con aplicar la propiedad
asociativa.
Al vector que se obtiene al sumar o restar varios vectores se le
denomina resultante.
La suma de los vectores podemos realizarla de dos maneras
diferentes, analítica y gráficamente.
Para sumar dos vectores de
manera gráfica utilizaremos la denominada Regla del paralelogramo,
consistente en trasladar paralelamente los vectores hasta unirlos por el
origen, y luego trazar un paralelogramo, del que obtendremos el resultado de la
suma, como consecuencia de dibujar la diagonal de ese paralelogramo, como
podemos ver en el siguiente dibujo:
Otra manera de expresar la suma de manera gráfica es trasladar el
segundo vector a sumar de tal manera que el origen de éste, coincida con el
extremo del primer vector, y la suma la obtendremos dibujando un vector que
vaya desde el origen del primer vector hasta el extremo del segundo, de la
siguiente manera:

Hay que tener muy presente lo siguiente:
vectores en la misma dirección se suman (tal y como ya hemos visto en la
sección de la suma
de vectores), pero vectores con sentidos opuestos se restan (tal y
como se puede ver en el apartado correspondiente a la resta de vectores). A
continuación tenemos un ejemplo de suma y resta de vectores.


Dados tres vectores
La expresión correspondiente al vector suma  es:
o bien
siendo, por tanto,
La suma de vectores goza de las siguientes propiedades:
es:
o bien
siendo, por tanto,
La suma de vectores goza de las siguientes propiedades:
Conmutativa
a + b = b + a
Asociativa
(a + b) + c = a + (b + c)
Elemento neutro o vector 0
a + 0 = 0 + a = a
Elemento simétrico u opuesto a'
a + a' = a' + a = 0
a' = -a
El resultado de multiplicar un escalar k por un vector v, expresado analíticamente
por kv, es otro vector con las siguientes características :
1.- Tiene la misma dirección que v.
2.- Su sentido coincide con el de v, si k es un número positivo, y es el opuesto, si k es un número negativo.
3.- El módulo es k veces la longitud que representa el módulo de v. ( Si k es 0 el resultado es el vector nulo).
Analíticamente, tenemos que multiplicar el escalar por cada una de
las coordenadas del vector.
Ejemplo : Dado el vector v de componentes : vxi + vyj + vzk, el producto 3 · v = 3 · vxi + 3 · vyj + 3 · vzk.
La representación gráfica del producto es igual a sumar el vector
tantas veces como indica el escalar.
Ejemplo :
Propiedades
El producto de un vector por un escalar cumple las siguientes
propiedades:
1.- Conmutativa: k · v = v · k.
2.- Distributiva: k (v + u) = (k · v ) + (k · u).
3.- Elemento Neutro: 1 · v = v.
4.- Elemento Simétrico: -1 · v = - v.
El producto escalar de dos vectores, expresado analíticamente como r · v, se obtiene de la suma de
los productos formados por las componentes de uno y otro vector. Es decir,
dados dos vectores r y v, expresados en un mismo
sistema de coordenadas:
r = rxi + ryj + rzk
v = vxi + vyj + vzk
teniendo en cuenta que el producto escalar de los vectores :
i · i = j · j = k · k = 1
i · j = i · k = j · k = 0
el resultado de multiplicar escalarmente r por v es:
r · v = rx· vx + ry · vy+ rz · vz
Esta operación no solo nos permite el cálculo de la longitud de los
segmentos orientados que representan ( sus módulos ), sino también calcular el
ángulo que hay entre ellos. Esto es posible, ya que el producto escalar también
se puede hallar en función de sus módulos y del coseno del ángulo que forman
mediante la fórmula :
r · v = |r| · |v| · cos (r, v)
Propiedades
Conmutativa : r · v = v · r
Distributiva : r · ( v + u ) = r · v + r · u
Asociativa : ( k · r ) · v = k · ( r · v ) = r · ( k · v ) siendo k escalar.
Además :
1.- r · r = 0 si, y sólo sí r = 0.
2.- Si r y v <> 0 y r · v = 0, esto implica que los vectores son perpendiculares, (cos 90º =
0).
3.- El producto escalar de dos vectores es equivalente a multiplicar escalarmente
uno de ellos por el vector proyección del otro sobre él.
Ejemplo :
Proyección ortogonal (rv) de r sobre v
rv= |r| cos (r, v) -> r · v = |v| · rv
Ejemplo :
Calcular el producto escalar de los vectores r =5 i - 3 j + 2 k y v = -2 i + j + 3 k. Hallar el ángulo que forman.
Primero hallamos el producto escalar de los vectores :
r · v = 5 · (-2) + (-3) · 1 + 2 · 3 = -7
Ahora calculamos el angulo que forman;
sabemos que :
como ya calculamos r · v, nos queda que hallar el
producto de sus módulos para poder realizar el cociente:
|r| · |v| = 22.17.
Entonces
y obtenemos que el ángulo entre los vectores es = 108.06º.
Producto escalar
El producto escalar de dos vectores es por definición un escalar.
Propiedades: 
 Podemos usar ahora el producto escalar para encontrar el ángulo de
los vectores a y b:
Con lo que deducimos que:
Podemos usar ahora el producto escalar para encontrar el ángulo de
los vectores a y b:
Con lo que deducimos que:
- El cos dará siempre entre 0 y 1
- El producto escalar varía como máximo entre el
 y 0
y 0
- El cos nos dice si los vectores son paralelos o perpendiculares
Si cos de a y b = 0 vectores perpendiculares.
Si cos de a y b <> 0 vectores perpendiculares.
En este caso,  , podemos sacar como conclusión que a = 0 ó b = 0, o bien que a y b son mutuamente perpendiculares.
, podemos sacar como conclusión que a = 0 ó b = 0, o bien que a y b son mutuamente perpendiculares.
Producto vectorial
El producto vectorial de los vectores a y b, se define como un vector,
donde su dirección es perpendicular al plano de a y b, en el sentido del
movimiento de un tornillo que gira hacia la derecha por el camino más corto de a a b,
Se escribe  . Por tanto:
donde n es un vector unitario perpendicular al plano de a y b en el sentido del movimiento de un tornillo que gira hacia la
derecha de a a b.
Propiedades:
. Por tanto:
donde n es un vector unitario perpendicular al plano de a y b en el sentido del movimiento de un tornillo que gira hacia la
derecha de a a b.
Propiedades:
Un vector no solo nos da una dirección y un sentido, sino también
una magnitud, a esa magnitud se le denomina módulo.
Gráficamente: es la distancia que
existe entre su origen y su extremo, y se representa por:
Coordenadas cartesianas: En muchas ocasiones es conveniente tomar las componentes sobre
tres direcciones mutuamente perpendiculares OX, OY y OZ que forman un sistema
cartesiano tridimensional.
Si tomamos tres vectores unitarios, i sobre OX, j sobre OY y k sobre OZ, entonces podemos encontrar puntos ax, ay, az sobre OX,
OY, OZ, respectivamente, tales que:
y aplicando el teorema de Pitágoras nos encontramos con que el
módulo de a es:
14) DEFINA LOS ELEMENTOS
DE UN VECTOR.
Dirección de un vector
La direcccíon
del vector es la dirección
de la recta que
contiene al vector o de cualquier recta paralela a ella.
Sentido de un vector
El sentido
del vector  es el que va desde el origen
A al extremo
B.
es el que va desde el origen
A al extremo
B.
Módulo de un vector
El módulo
del vector es la longitud del segmento AB, se representa
por  .
.
El módulo de un vector es un número siempre positivo o cero.
Módulo
de un vector a partir de sus componentes
Módulo
a partir de las coordenadas de los puntos
15) ¿COMO
SE SUMAN VECTORES PARALELOS ?
Se toman como representantes dos vectores con el origen
en común, se trazan rectas paralelas a los vectoresobteniéndose
un paralelogramo cuya diagonal coincide con la suma de
los vectores.
Para sumar dos vectores se suman sus
respectivas componentes.
Propiedades de la suma de vectores
1 Asociativa
2 Conmutativa
3 Elemento neutro
4 Elemento opuesto
16) ¿ COMO
SE SUMAN VECTORES POR EL METODO GRAFICO ? BUSQUE EJEMPLOS
Suma de vectores por el método gráfico
Método cola a punta
En este método se utilizan la regla y el transportador,
existe una regla general y es la siguiente:
1.
Usar la misma escala para todos los vectores
2.
Trazar un vector (el orden no es importante)
3.
Trazar el segundo vector, empezando desde el final del primer
vector (la punta de la flecha), hay que dibujar correctamente el vector
cuidando el ángulo, longitud y sentido.
4.
La suma de los dos vectores es la flecha que se traza desde el
principio del primer vector hasta la punta del segundo.
NOTA: este método se puede usar con más de dos vectores.
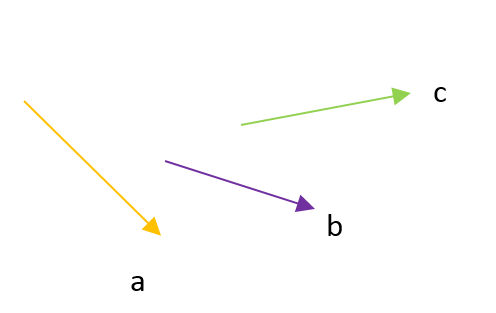
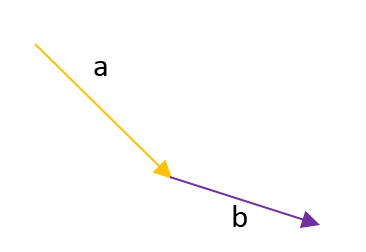
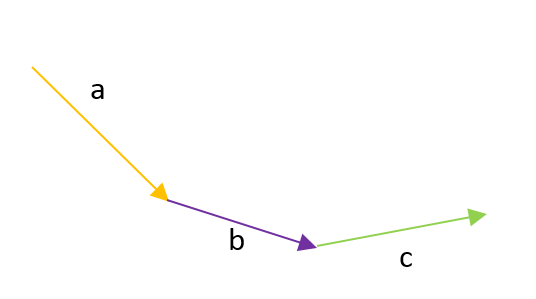
Ejemplo:
Tenemos los siguientes vectores:
Trazamos el vector “b” en la punta del vector “a”

Trazamos el vector “c” en la punta del vector “b”
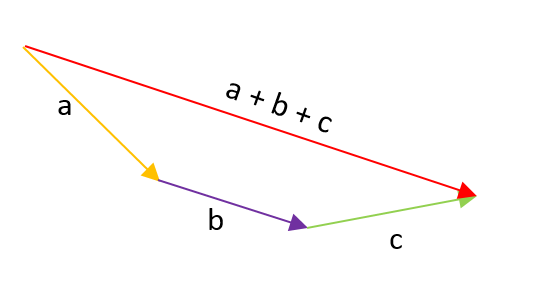
La resultante a+b+c es el vector que une el inicio (cola)
del vector “a” con la punta del vector “c”.
17) ¿ COMO SE HAYA LAS
COMPONENTES RECTANGULARES DE UN VECTOR ?
La
eficacia de una cantidad vectorial depende de la dirección en la que actúa. Por ejemplo,
suponga una fuerza (cantidad vectorial) que mueve una caja grande arrastrándola
por el suelo.
La caja se moverá más fácil si se hala por medio de una cuerda inclinada
(como se muestra en la figura) que si se empuja, debido a que la cuerda levanta
la caja y la mueve hacia adelante al mismo tiempo.
En forma similar, al empujar la caja, se produce el efecto de añadir
peso. Esto da la idea de que una fuerza, y en general, un vector, tiene componentes
verticales y horizontales que podrían reemplazar al vector.
En
general, las componentes de un vector son otros vectores, en direcciones
perpendiculares. El eje de referencia principal más utilizado es el plano
cartesiano.
Según
éste marco de referencia, las componentes horizontales son vectores en
dirección al eje x y las componentes verticales son vectores en dirección al
eje y.
Las magnitudes de las componentes se encuentran relacionadas con la
magnitud del vector principal por medio del teorema de pitágoras,
tomando como catetos las componentes, y como hipotenusa el vector principal.
La dirección del vector principal relaciona también a las magnitudes de
las componentes por medio de las relaciones trigonométricas conocidas para un
triángulo rectángulo simple. Las relaciones más utilizadas son el seno,
coseno y tangente.
Ejemplo. Encuentre la magnitud de las componentes en x e y del vector (3.5
u,60º).
La componente en x se puede encontrar fácilmente utilizando la relación
delcosena:
Resolviendo: Componente en x = (3.5 u)*cos(60º) = 1.75 u.
De manera similar, se puede encontrar la magnitud de la componente en y
por medio de la relación del seno; pero además se conoce la
magnitud del vector principal, lo cual permite utilizar el teorema de pitágoras:
Resolviendo:
Componente en y = 3.03 u
En general, las componentes de un vector pueden verse como efectos
o proyecciones a lo largo de los ejes x e y. Considere el vector V.
Podemos escribir las componentes en x e y del vector V en términos de su
magnitud V y su dirección θ:
- Componente en x, o Vx = V cos θ
- Componente en y, o Vy = V sen θ
donde θ es el ángulo, medido en dirección antihoraria, entre el vector V
y el lado positivo del eje x.
18) ¿ COMO SE SUMAN VECTORES POR EL METODO DE LAS COMPONENTES ?
se operan las componentes en y de los vectores principales y el
resultado es la componente en y del vector resultante.
Obtenidas las componentes de la resultante, se pueden encontrar la
magnitud, dirección y sentido de éste vector.
Cuando una componente, en x o en y, tiene un valor negativo, el sentido
de ésa componente es contrario a los lados positivos del marco de referencia.
Por ejemplo, si una componente en y tiene un valor negativo, la proyección en
el eje y de ése vector apunta hacia abajo.
Ejemplo. Calcule la
resultante de las fuerzas que se presentan en la figura.
Note que θ para los vectores B y C no son los que se presentan en la
figura, sino que se deben calcular a partir del eje x positivo (ángulos
suplementarios).
Para el vector B, θ = 180º - 45º = 135º
Para el vector C, θ = 180º + 55º = 235º
Calculando las componentes en x de los vectores A, B y C:
Ax = (200 N) cos (30º) = 173.20 N
Bx = (300 N) cos (135º) = - 212.13 N
Cx = (155 N) cos (235º) = - 88.90 N
Calculando las componentes en y de los vectores A, B y C:
Ay = (200 N) sen (30º) = 100 N
By = (300 N) sen (135º) = 212.13 N
Cy = (155 N) sen (235º) = - 126.97 N
Luego se calcula la fuerza resultante, encontrando las componentes de
ésta fuerza, a partir de una simple suma de componentes de fuerzas
individuales.
19) ¿ COMO SE SUMAN VECTORES POR EL METODO ANALITICO ?
Suma de Vectores. Método
Analítico
• Suma de
Componentes
La suma gráfica de vectores con regla y transportador a veces no tiene la
exactitud suficiente y no es útil cuando los vectores están en tres
dimensiones.
Sabemos, de la suma de vectores, que todo vector puede
descomponerse como la suma de otros dos vectores, llamados las componentes
vectoriales del vector original. Para sumarlos, lo usual es escoger las
componentes sumando a lo largo de dos direcciones perpendiculares entre sí.
Ejemplo Suma Vectores: suponga un vector V cualquiera
Trazamos ejes coordenados x y con origen en la cola del vectorV.
Se trazan perpendiculares desde la punta del vector V a los ejes x y y determinándose sobre
el eje x la componente vectorialVx y sobre el eje y la componente
vectorial Vy.
Notemos que V = Vx + Vy de acuerdo al método del
paralelógramo.
Las magnitudes de Vx y Vy,
o sea Vx y Vy,
se llaman componentes y son números, positivos o negativos según si apuntan
hacia el lado positivo o negativo de los ejes x y y.
Notar también que Vy =
Vsen y Vx = Vcos
y Vx = Vcos
• Suma de
Vectores Unitarios
Frecuentemente las cantidades vectoriales se expresan en términos de  unitarios. Un vector unitario es un
vector sin dimensiones que tiene magnitud igual a uno. Sirven para especificar
una dirección determinada. Se usan los símbolos i, jy k para representar vectores unitarios
que apuntan en las direcciones x, y y z positivas, respectivamente.
unitarios. Un vector unitario es un
vector sin dimensiones que tiene magnitud igual a uno. Sirven para especificar
una dirección determinada. Se usan los símbolos i, jy k para representar vectores unitarios
que apuntan en las direcciones x, y y z positivas, respectivamente.
Ahora V puede escribirse
 V = Ax i + Ay j
V = Ax i + Ay j
Si necesitamos sumar el vector A = Ax i + Ay j con el vector
B = Bx i + By j escribimos
R = A + B = Ax i + Ay j + Bx i + By j = (Ax + Bx)i + (Ay + By)j
Las componentes de R (=A + B)
son Rx = Ax + Bx y Ry = Ay + By
Problema Ilustratorio
El siguiente ejercicio es para aclarar el uso de vectores unitarios en este
método analítico.
Un auto recorre 20 km hacia el Norte y después 35 km en una
dirección 60º al Oeste del Norte. Determine magnitud y dirección del
desplazamiento resultante del auto.
Hacemos un diagrama:
Expresando los dos desplazamientos componentes como A y B,
indicados en la figura, y usando unitarios, tenemos:
R = A + B. R es el vector resultante buscado, cuya
magnitud se
denota  y cuya dirección puede determinarse
calculando el ángulo
y cuya dirección puede determinarse
calculando el ángulo  .
.
A = 20 km j, (apunta hacia
el Norte).
B debemos descomponerlo en componentes x e y (ó i y j )
B = -(35 km)sen60ºi + (35 km)cos60ºj = -30.3 kmi + 17.5 kmj
Luego,
R = 20 kmj - 30.3 kmi + 17.5 kmj = 37.5j - 30.3i.
La magnitud se obtiene de
2 = (37.5km)2 + (30.3km)2  = 48.2 km
= 48.2 km
La dirección de R la determinaremos calculando el ángulo .
En el triángulo formado por cateto opuesto 30.3 y cateto adyacente 37.5, tg = 30.3/37.5 =
arctg(30.3/37.5) = 38.9º
20) ¿ A QUE LLAMAMOS EL OPUESTO DE UN VECTOR ?
Se conoce como vectores opuestos a aquellos que tienen la misma dirección y la misma magnitud, pero
cuentan con sentidos contrarios. De
acuerdo a otras definiciones, los vectores opuestos tienen igual magnitud
aunque dirección contraria debido a que la dirección también señala el sentido.
21) ¿ COMO SE MULTIPLICA UN
VECTOR POR UN ESCALAR ?
22) ¿ A QUE LLAMAMOS UNA
FUNCION ?
Dados dos
conjuntos A y B, llamamos función a la correspondencia de A en B en
la cual todos los elementos de A tienen a lo sumo una imagen en B,
es decir una imagen o ninguna.
Función real de
variable real es toda correspondencia f que asocia a cada elemento de un
determinado subconjunto de números reales, llamado dominio, otro número real.
f
: D 

x f(x) = y
El subconjunto en
el que se define la función se llama dominio o campo existencia de la
función. Se designa por D.
El número x perteneciente
al dominio de la función recibe el nombre de variable
independiente.
Al número, y,
asociado por f al valor x, se le llama variable dependiente. La imagen de x se
designa por f(x). Luego
y= f(x)
Se denomina recorrido de
una función al conjunto de los valores reales que toma la variable y o
f(x).
x 
Conjunto
inicial Conjunto final
Dominio Conjunto imagen o recorrido
El dominio es el
conjunto de elementos que tienen imagen.
D = {x ∈ /
∃
f (x)}
El recorrido es el
conjunto de elementos que son imágenes.
R = {f (x) / x ∈ D}
23) DEFINA VARIABLES ,
CONSTANTE ,VARIABLE DEPENDIENTE E INDEPENDIENTE .
El término variable
se puede definir como toda aquella característica o cualidad que identifica a
una realidad y que se puede medir, controlar y estudiar mediante un proceso de
investigación. La posibilidad de poder medir, controlar o estudiar una
variable, es decir una característica de la realidad es por el hecho que esta
característica varía, y esa variación se puede observar, medir y
estudiar. Por lo tanto, es importante, antes de iniciar una investigación,
saber cuáles son las variables que se desean medir y la manera en que se hará.
Una variable puede tomar diferentes valores dependiendo del enfoque, que
le dé, el investigador. Estos valores pueden ser desde el enfoque
cuantitativo o desde el enfoque cualitativo. Desde el inicio de la
investigación es necesario saber cuáles son los tipos, de variables o clases de
variables que existen. En la práctica existen tres tipos de variables. Existen
las variables independientes, las variables dependientes y las variables
intervinientes. La variable
independiente es aquella propiedad, cualidad o característica de una
realidad, evento o fenómeno, que tiene la capacidad para influir, incidir o
afectar a otras variables. Se llama independiente, porque esta variable
no depende de otros factores para estar presente en esa realidad en estudio.
Algunos ejemplos de variables independientes son; el sexo, la raza, la edad,
entre otros. Veamos un ejemplo de hipótesis donde está presente la variable
independiente: “Los niños que hacen tres años de educación preescolar, aprenden
a leer mas rápido en primer grado.” En este caso la variable independiente es
“hacen tres años de educación preescolar.” Porque para que los niños de primer
grado aprendan a leer más rápido, depende de que hagan tres años de educación
preescolar. La variable dependiente;
es aquella característica, propiedad o cualidad de una realidad o evento
que estamos investigando. Es el objeto de estudio, sobre la cual se centra la
investigación en general. También la variable independiente es manipulada
por el investigador, porque el investigador el puede variar los factores para
determinar el comportamiento de la variable. Por ejemplo: “Los niños que hacen
tres años de educación preescolar, aprenden a leer mas rápido en primer grado.”
En este caso la variable dependiente sería “aprenden a leer mas rápido”, pero
aprenden a leer mas rápido como consecuencia de que “hacen tres año de
educación preescolar”. Por esta razón se recomienda que en el
título de un trabajo siempre debe aparecer la variable dependiente,
pues está es el objeto de estudio. También existen variables independientes en
algunos estudios que hasta cierto punto dependerán de “algo”, como en el
ejemplo siguiente: “Los ingresos económicos de un hospital público
puede depender de la asignación en el presupuesto nacional del país.” Como
podemos observar el objeto de estudio no está influyendo en la variable
independiente. De este modo, la variable independiente en un estudio se cree
que está influyendo en la variable dependiente, el estudio Correlacional se
centra precisamente en esa relación.
24) ¿ CUANDO EXISTE
PROPORCIONALIDAD DIRECTA ENTRE DOS VARIABLES ? FORMA DEL GRAFICO
Dadas dos variables X e Y, Y es (directamente)
proporcional a X (X e Y varían directamente, o X e Y están en variación directa) si hay
una constante k distinta de cero tal que:
La relación a menudo se denota
Los dos rectángulos con franjas son semejantes, los cocientes de
sus dimensiones se indican horizontalmente en la imagen. La duplicación de la
escala del triángulo con franjas se indica oblicuamente en la imagen.
y la razón constante
25) ¿Cuándo EXISTE
VARIACION LINEAL ENTRE DOS VARIABLES ? FORMA DEL
GRAFICO
Se presenta una relación lineal entre dos variables
cuando al graficarlas, la unión de los puntos determinados por estas, tanto en
el eje “x” como en el eje “y” forman una línea
recta. Lo cual nos representa que existe una
relación directamente proporcional en donde “y” es dependiente de la
variable “x”.
El modelo matemático que describe una relación
lineal cuando se estima el valor de y en función de x esta dada así:
= bx + c o = Bx + c ó = ß1x + ß0
26) ¿ CUANDO EXISTE
PROPORCIOINALIDAR INVERSA ENTRE DOS VARIABLES? FORMA DEL GRAFICO
Dos variables x e y son inversamente
proporcionales si su producto x por y es constante. En este caso se dice que
las variables x e y son inversamente proporcionales.
Dicho de otra manera si una de las variables
aumenta (x), la otra disminuye (y); y si una de las variables disminuye (x), la
otra variable aumenta (y).
Etiquetas: fisica basica